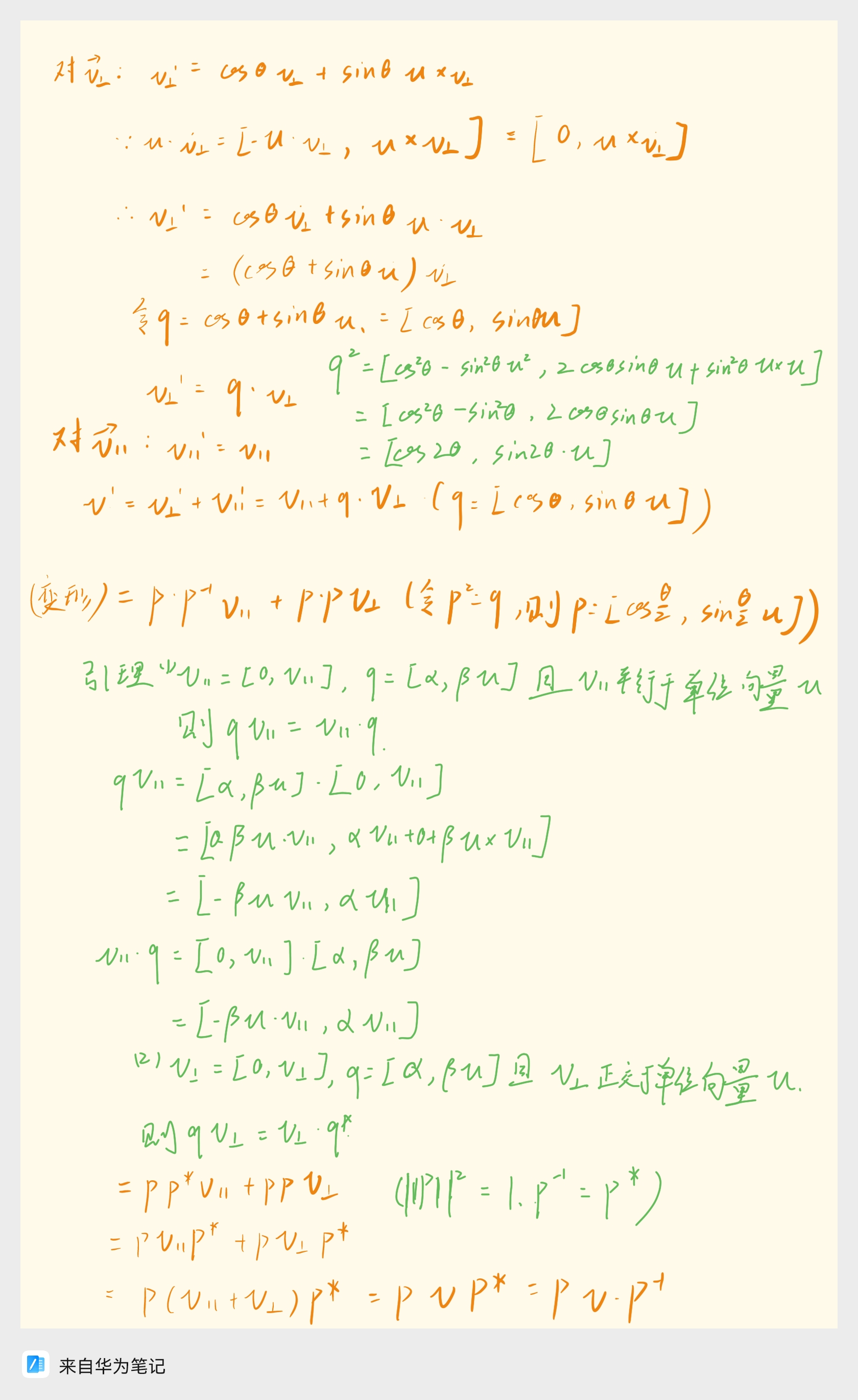
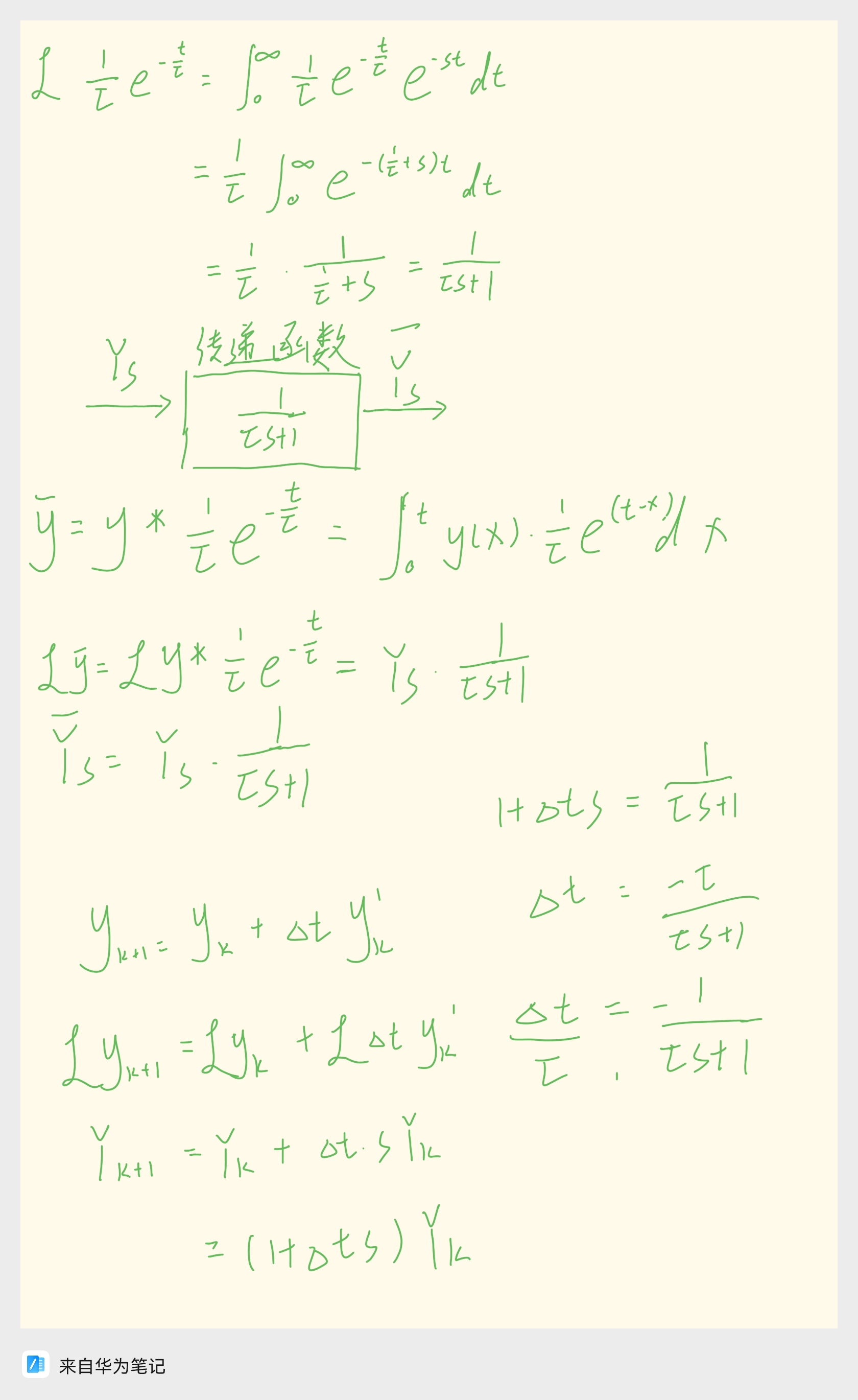
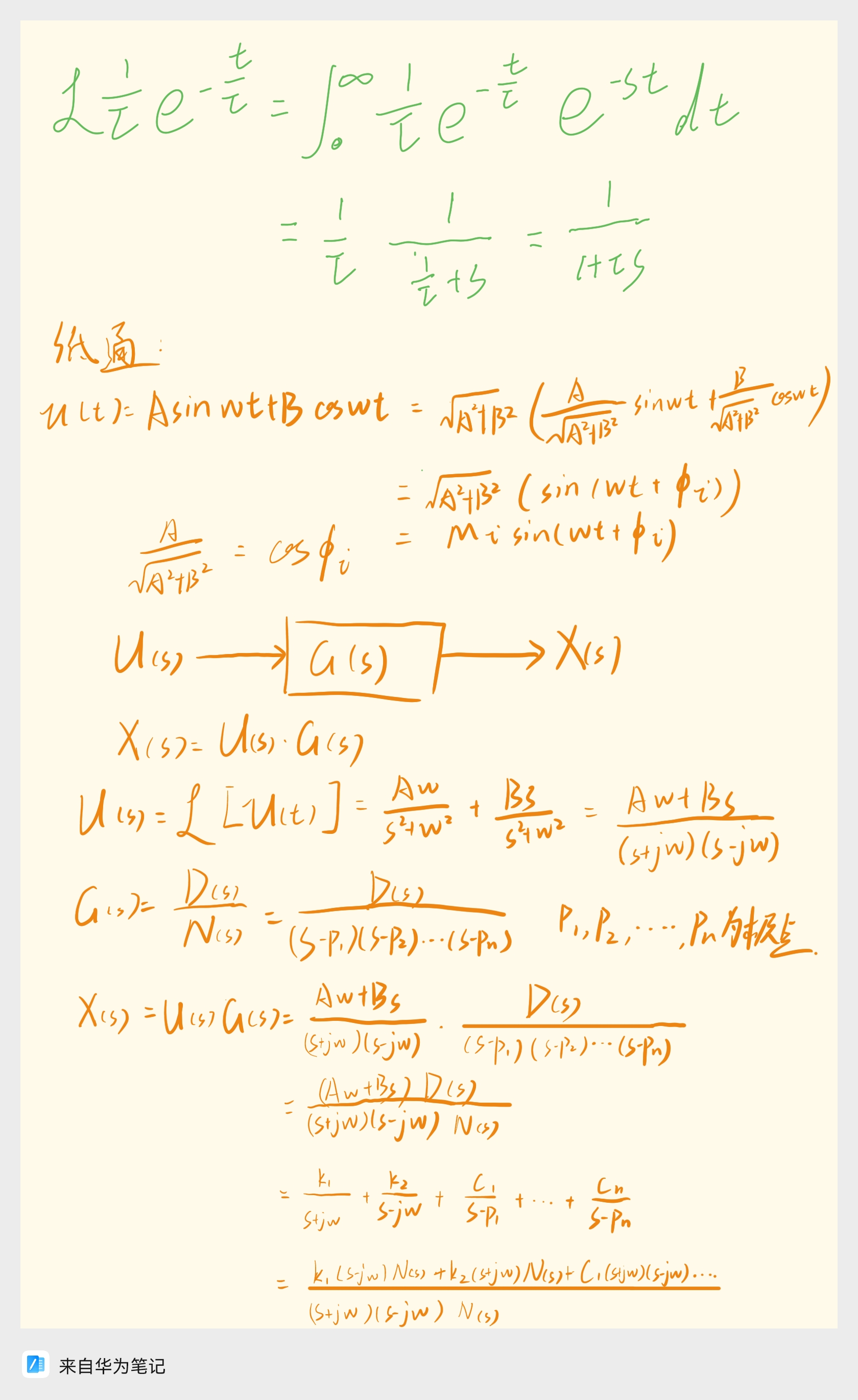
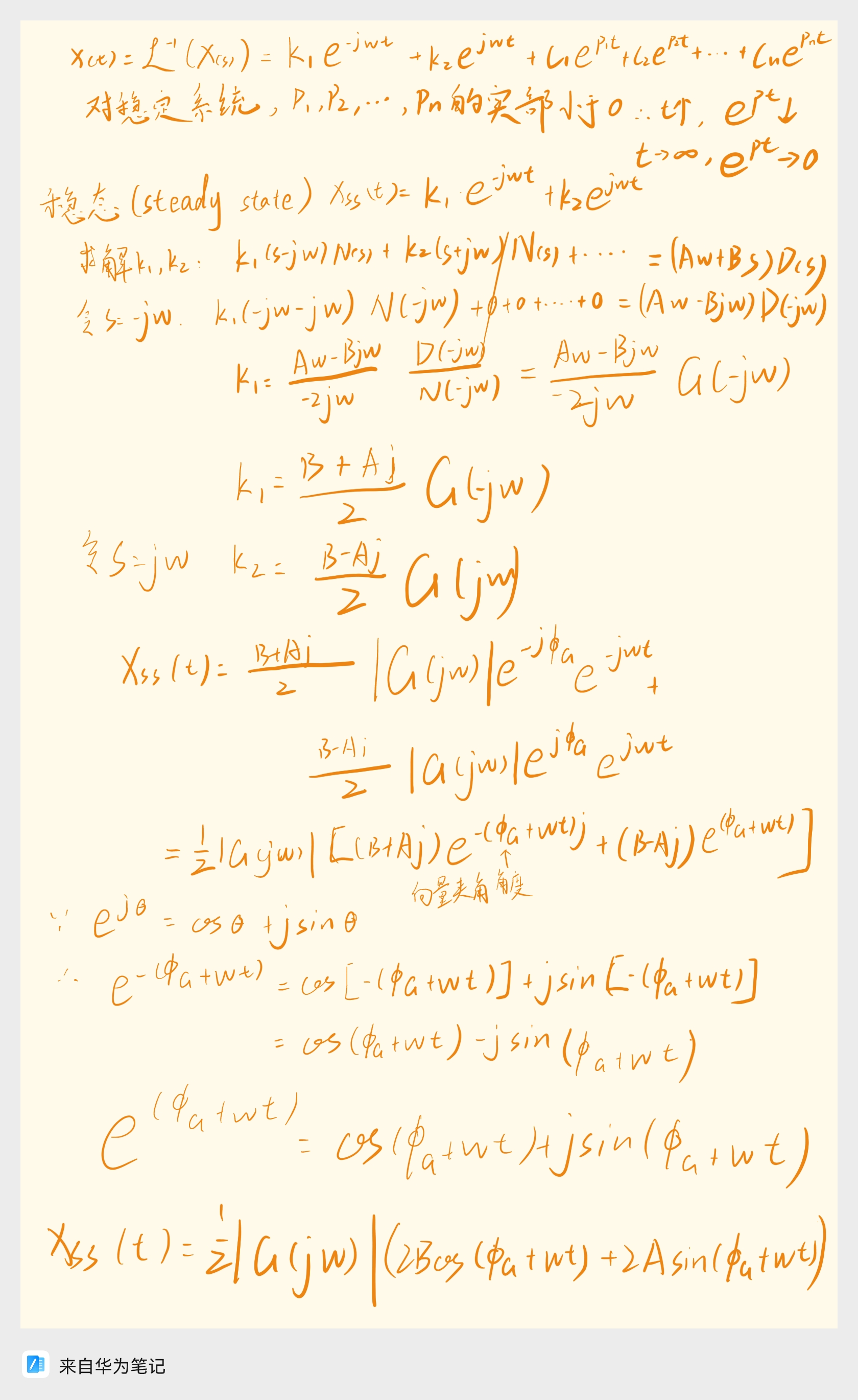
姿态解算手稿整理 手稿整理从一开始的姿态表示(欧拉角、四元数、旋转矩阵),到滤波用的拉普拉斯变换,再到控制PID。 无人机 > 姿态解算 姿态解算手稿整理 http://example.com/2025/08/17/25_08_17姿态解算手稿整理/ 作者 ZF ZHAO 发布于 2025年8月17日 许可协议 傅里叶变换手稿整理 上一篇 姿态解算资料整理 下一篇