四足机器人运动学与动力学
四足机器人运动学与动力学
运动学分析
单腿运动学分析
正运动学分析
概述:已知关节角度,求解足端位置
分类:三自由度串联腿,二自由度并联腿。(以三自由度串联腿为例,二自由度并联腿只需要去掉绕X轴的旋转关节,再加上一个电机角度的换算即可)
步骤:
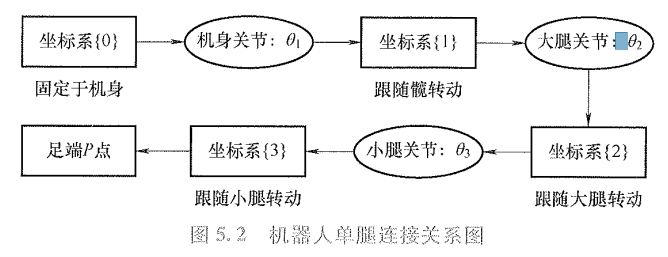
- 建立坐标系
每个关节(自由度)都代表一个坐标系,以此实现腿部活动。如下图所示,可以建立三个坐标系,还有一个机体自身的坐标系
- 计算变换矩阵
已知三个角度,每个关节对应一组旋转矩阵T(0,1),T(1,2),T(2,3)。
注意:左右腿的腿长互为相反数,便于表示 - 求解足端位置
将旋转矩阵和基体系坐标累乘之后可以得到足端位置
可以将三个坐标分别看作是三个角度组成的函数,引入雅各比矩阵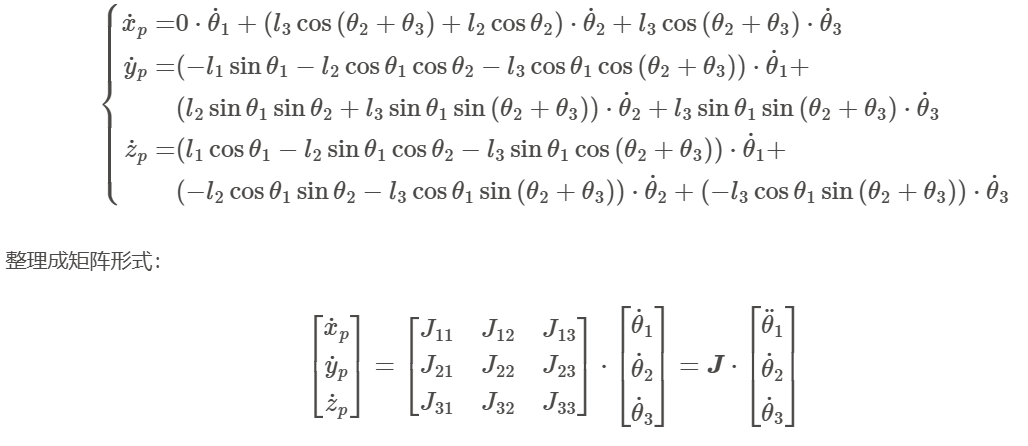
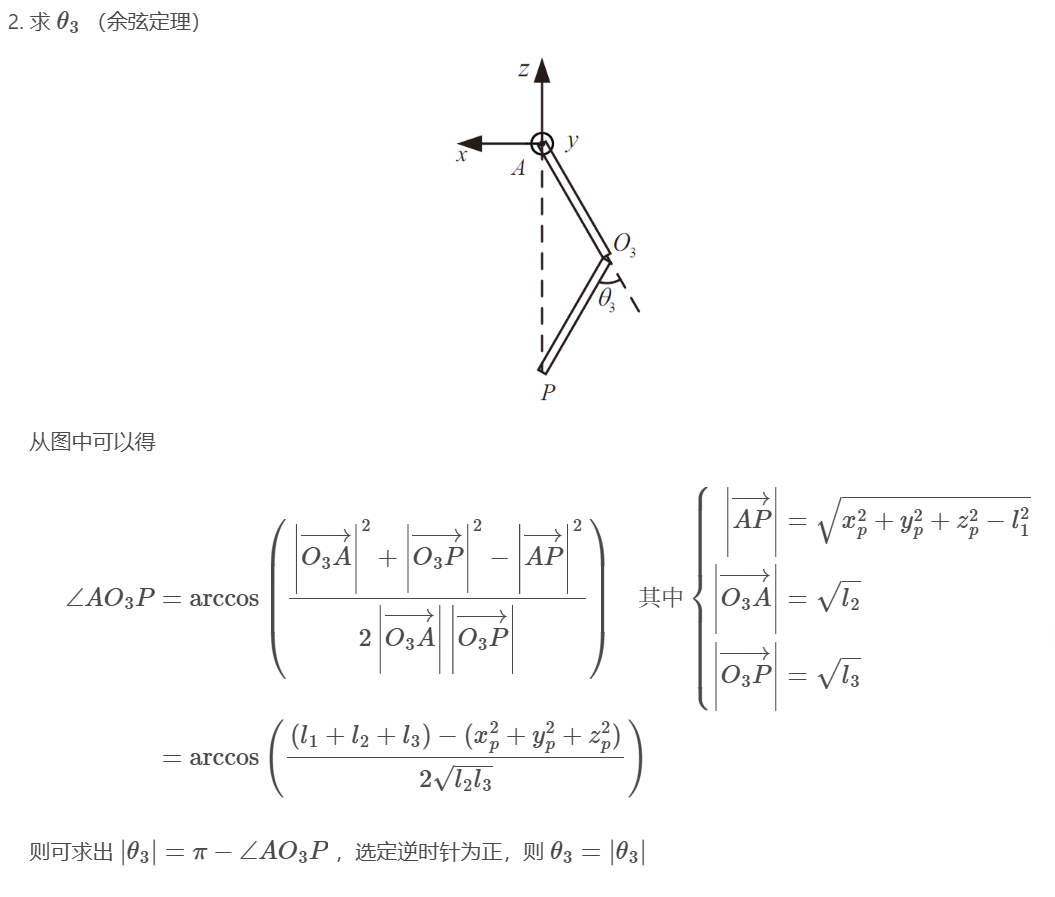
逆运动学
概述:已知足端位置,求解关节角度
步骤: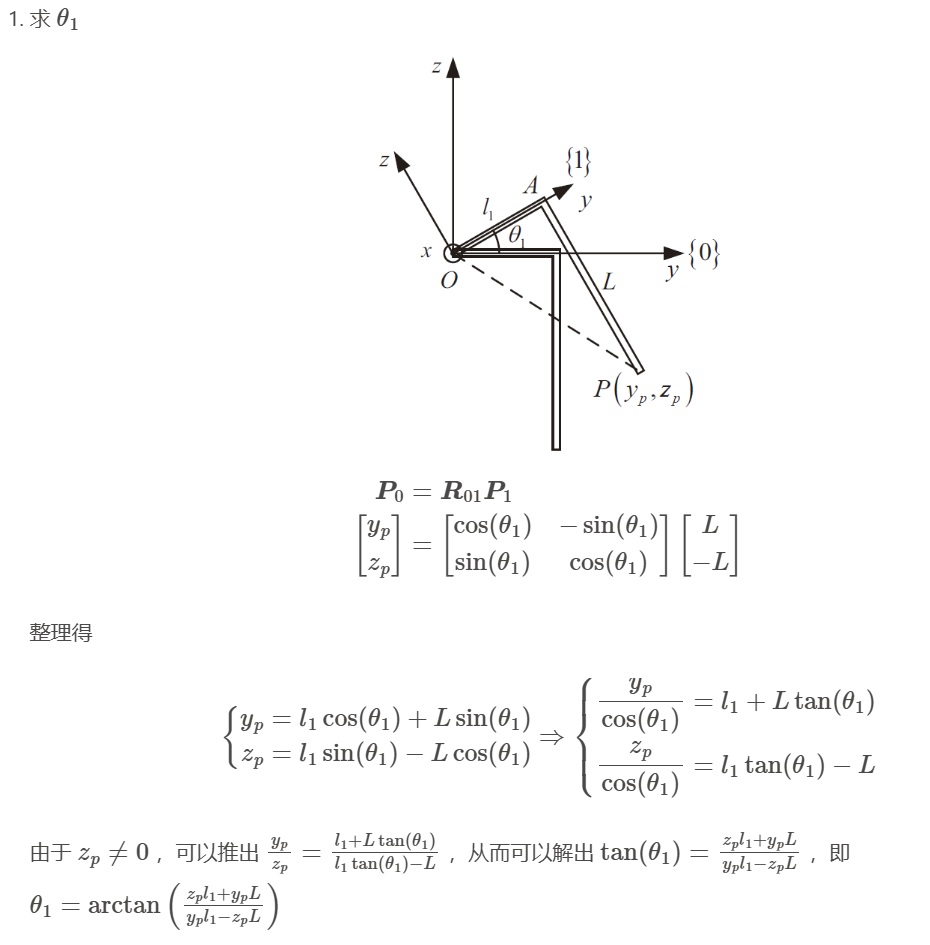

单腿静力学分析
前提四足机器人静止,此时可以认为关节电机的功率和足端力的功率守恒(考虑做功守恒会有当前时刻做功不一样但总功一样,控制精度较差)
公式
- 力矩乘以角加速度等于足端力乘以线速度
- 代入雅各比矩阵的公式化简
- 推出关节力矩和足端力的关系 (和运动学分析得到的雅各比矩阵有关)

四足运动学
静止姿态的改变
目标:已知机身姿态,求关节角度
步骤:
- 先假定右前足端为世界系的坐标原点,建立世界坐标系
- 计算四个足端相对于世界系的坐标P(s,i)=T(s,b)P(b,i)
- 姿态不同,T会改变,P(b,i)已知,求解P(s,i)
- 由运动学逆解去推关节角度
足端速度
足端速度分解:
- 关节转动产生的速度v1(b)(用雅各比矩阵求)
- 机身平移旋转产生的速度v2(b)(目标量)
背景:机体有平移速度v0,Pi绕PO有角速度wi
v2(b)等于v0+wi*(p0-pi)
v(s)=T(s,b)(v1(b)+v2(b))
四足动力学
四足机器人运动学与动力学
http://example.com/2025/08/12/25_08_12四足机器人运动学与动力学/