LOAM_Livox论文笔记
解决问题
- 在非常有限的FoV中进行特征提取和选择
- 鲁棒的离群点剔除:激光雷达的扫描线束和扫描轨迹分布不均匀
- 移动对象过滤
- 运动失真补偿
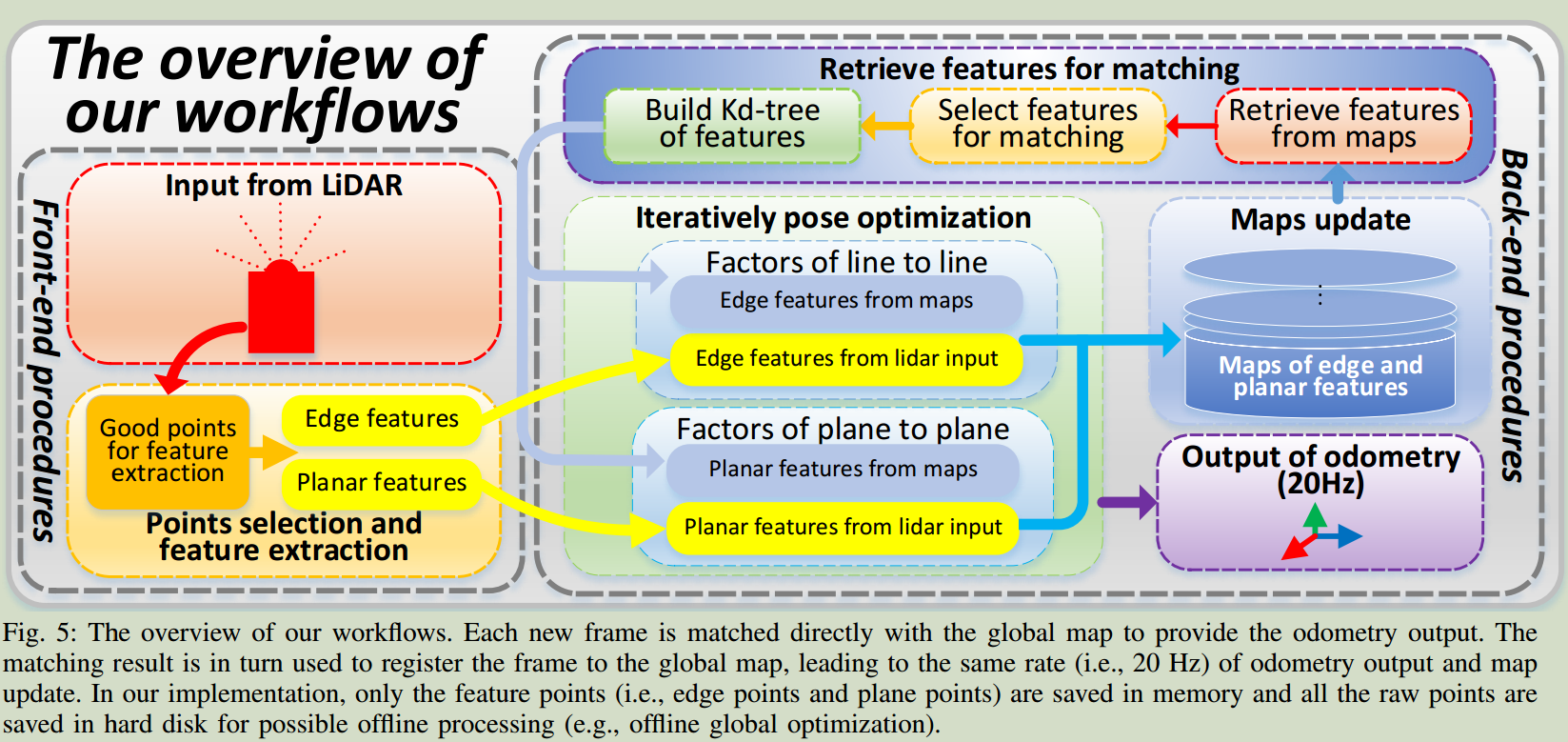
POINTS SELECTION AND FEATURE EXTRACTION
受激光雷达在真实物理世界的限制,需要在原始点云信息中提取出好的特征点
- 分类
按照特定指标选择点- 对于每个点计算下列指标
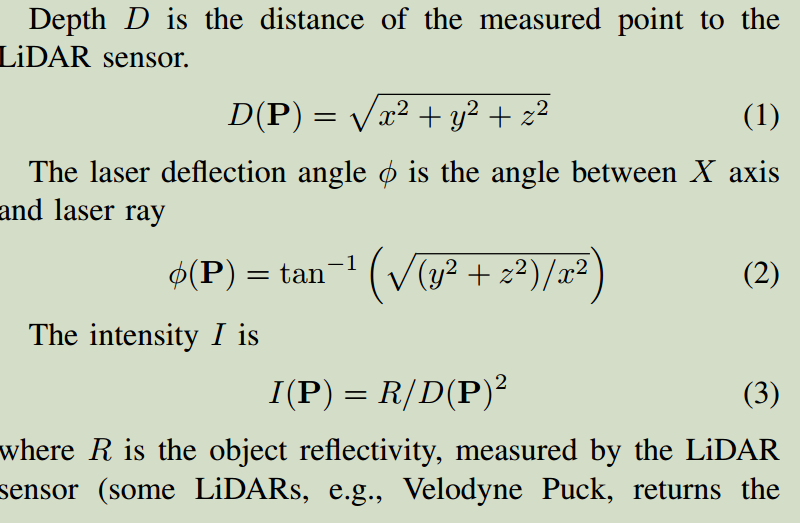
- Depth D:点到雷达的距离
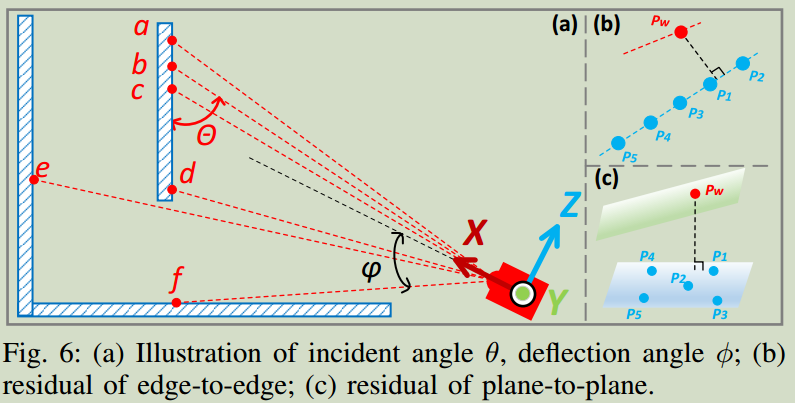
- laser deflection angle φ :X轴与激光线夹角
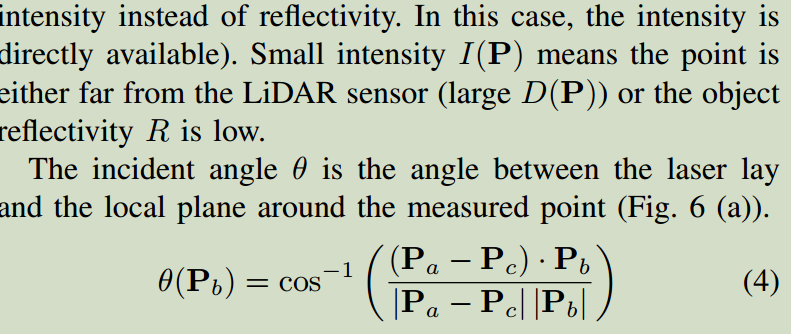
- intensity I :反射强度,R是物体反射率,由雷达测量
- incident angle θ :入射角,激光层与测量点周围的局部平面之间的角度
- 计算公式
- 舍弃原则
- 靠近雷达视野边缘。此时扫描轨迹不可靠
- intensity太大或太小。都会降低测量的准确率
- 入射角接近π或0的点。会产生光斑导致测量的是一片范围的均值而不是某一特定点
- 被障碍物遮挡的点。会被误判为边缘点
- 特征提取
- 计算局部平滑度(应该是曲率)来提取边缘点和平面点
- 引入反射率作为判断依据,如果由一点和周围点的反射率区别过大,被视为(材料)边缘点
ITERATIVE POSE OPTIMIZATION 迭代姿态优化
受雷达非重复扫描的影响,不能利用重复点的匹配来获得位姿
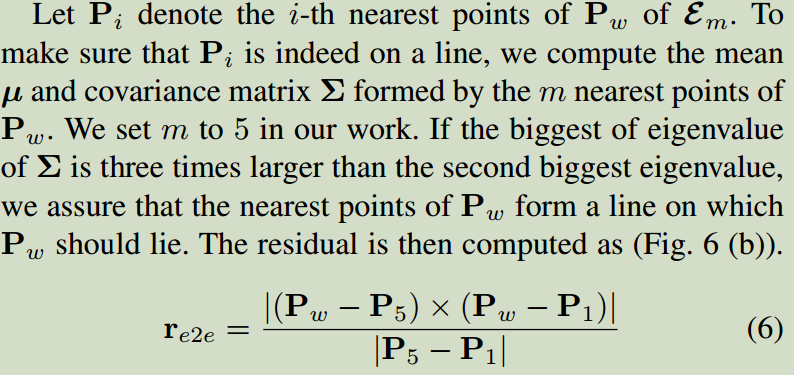
- 边对边的残差计算
- 在当前帧中选取一点Pl,再从全局地图中选取距离Pl最近的5个点:先将Pl映射到地图系,在从地图系的KDtree里面选取5个点
- 以当前帧的最后一点Pw的雷达姿态为准,计算当前帧到地图的转换矩阵来实现投影
- 确保选取的5个Pi和点Pw在同一条直线上
- 残差计算
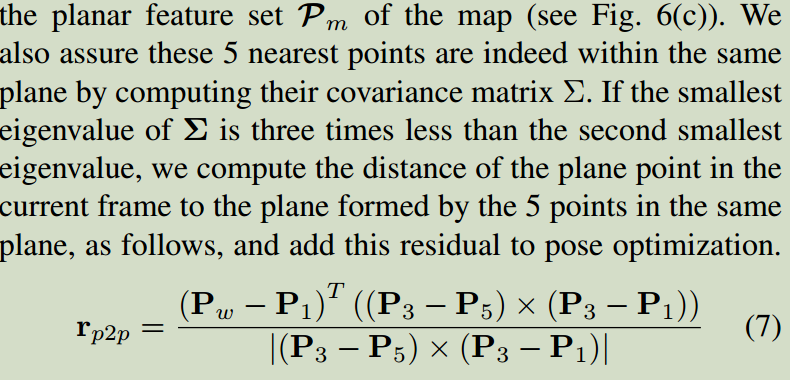
- 面对面的残差计算
和边对边的残差计算思路相同,就是计算是否是同一平面上由不同
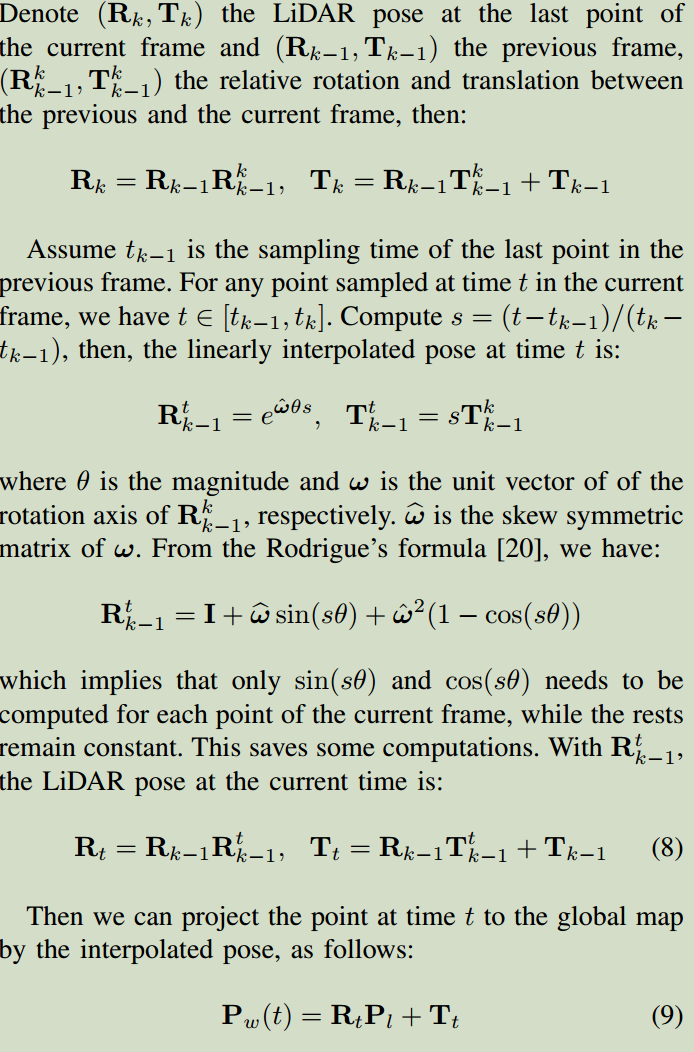
- 帧内运动补偿
- 分段处理:同一帧分成几部分,独立进行处理。相当于缩短运动时间,减轻运动带来的影响,分开处理还可以并行计算,缩短计算时间
- 线性插值:假设在一帧中运动是均匀的,可以利用最后一个点的姿态变化去估计之前点的转换矩阵
- 离群点剔除和移动对象过滤
避免移动物体对扫描精度产生影响
思路:在每次迭代重新计算所有特征点对应的残差,先做迭代优化残差,最后在优化后结果中去除前20%最大的点(边缘点和平面点分开进行处理)
个人评价
亮点:
- 特征提取时引入反射强度作为评价依据
- 迭代姿态优化可以解决雷达扫描不重复的问题
- 将优化后残差较大的点作为运动点
LOAM_Livox论文笔记
http://example.com/2025/08/20/25_08_20LOAM-Livox论文笔记/