RCNN物体检测算法
R-CNN
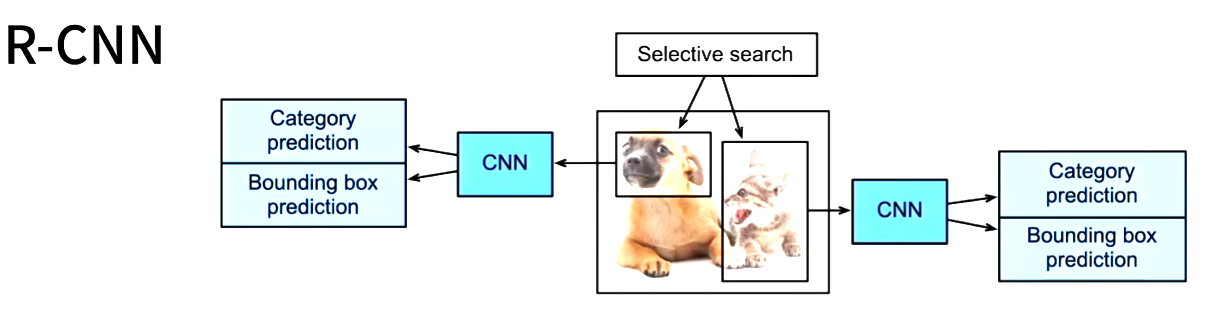
- 启发式搜索来选择锚框
- 通过CNN提取特征
- 基于锚框的分类和回归
- 分类: SVM
- 回归: 线性回归,来获得锚框和目标框的偏移量
兴趣区域(ROI)池化层
将不同大小的特征图转换为固定大小的特征图
- 输入: 特征图, 锚框
- 输出: 固定大小的特征图
- 过程:
- 对每个锚框, 均匀分割为固定数量的区域
- 对每个区域, 取像素最大值
- 输出固定大小的特征图

Fast R-CNN
改进
- 改变了启发式搜索的位置
- 引入了CNN的特征提取层,在ROI池化层之前。在原图像中启发式搜索获取锚框,映射到CNN的输出上,再交给CNN。可以先抽取全局的特征再进行ROI池化,而不是先ROI池化再过CNN.
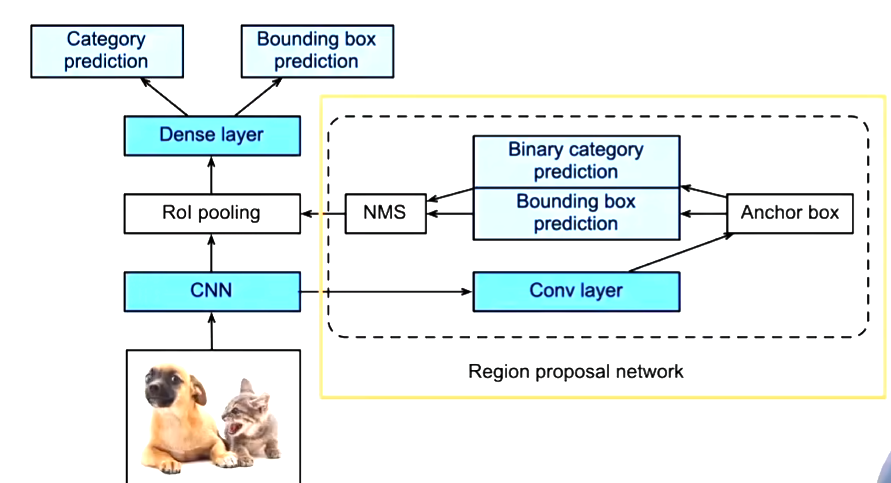
Faster R-CNN
改进(相对于 Fast R-CNN)
- 将启发式搜索替换为区域建议网络RPN(Region Proposal Network)
- 输入: 图像
- 输出: 锚框
- 过程:
- 使用CNN提取特征图
- 生成锚框
- 预测每个锚框的分类和回归偏移量
- 非极大值抑制(NMS)
- 输入: 锚框, 分类分数
- 输出: 保留的锚框
- 过程:
- 对每个类别, 按分类分数排序
- 从高到低遍历, 保留当前锚框, 并移除与当前锚框重叠度高的锚框
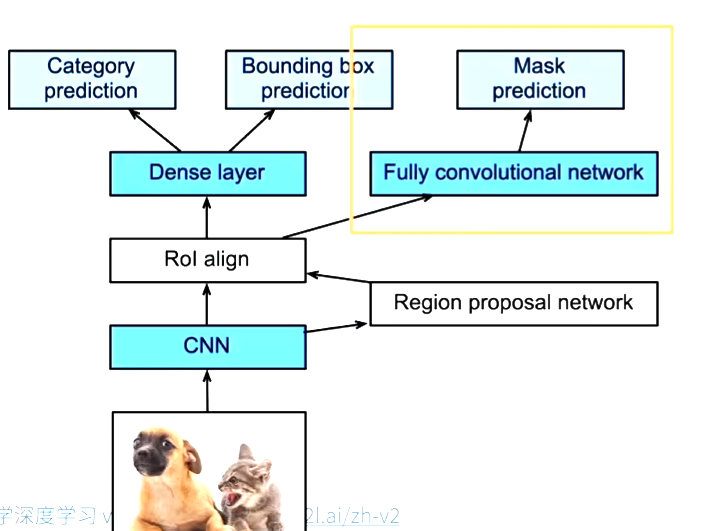
Mask R-CNN
改进(相对于 Faster R-CNN)
- 引入了掩码预测层FCN( Fully Convolutional Network)
- 作用:利用像素级的标号
- 输入: 锚框
- 输出: 掩码
- 过程:
- 对每个锚框, 预测一个二进制掩码
- 对每个像素, 预测它是否属于物体
- ROI池化层被替换成ROI align层
- 作用:更准确的提取特征
- 输入: 特征图, 锚框
- 输出: 固定大小的特征图
- 过程:
- 对每个锚框, 均匀分割为固定数量的区域(每个区域的大小相同,交叉的像素点会被按权重拆开)
- 对每个区域, 取像素最大值
- 输出固定大小的特征图
RCNN物体检测算法
http://example.com/2025/08/19/25_08_19RCNN物体检测算法/