LOAM论文笔记
LOAM: Lidar Odometry and Mapping in Real-time 笔记
论文概述
实时性的位姿估计定位和建图算法,既有高频率低精度里程计进行运动估计,又有低频率高精度点云匹配来地图建图。
算法一 LIDAR ODOMETRY
- 特征点匹配:通过计算曲率c来判断点是否为角点或面点。在c的计算中引入S来消除距离影响,将每一次扫描分成多个相同的子区域,保证特征点的均匀分布。还要注意排除几种特殊情况。
- 寻找对应特征点集合:
- 先将前一时刻的点云投影到当前时刻。
- 利用两个时刻的点云信息来进行角点和面点的匹配,使用最近邻搜索相邻特征点,角点进行点到直线的距离计算,面点进行点到平面的距离计算。
- 运动动作估计:
- 通过角点和面点的匹配来计算变换矩阵T。
- 知道在一段时间内的变化矩阵T,假设运动是均匀的,可以利用时间进行线性插值,得到当前时刻的变换矩阵T。
- 利用变换矩阵T来根据投影量更新当前时刻的点云坐标。
- 进而将该特征点的距离公式作为损失函数,利用优化算法来求解变换矩阵T,使得距离趋近于0.
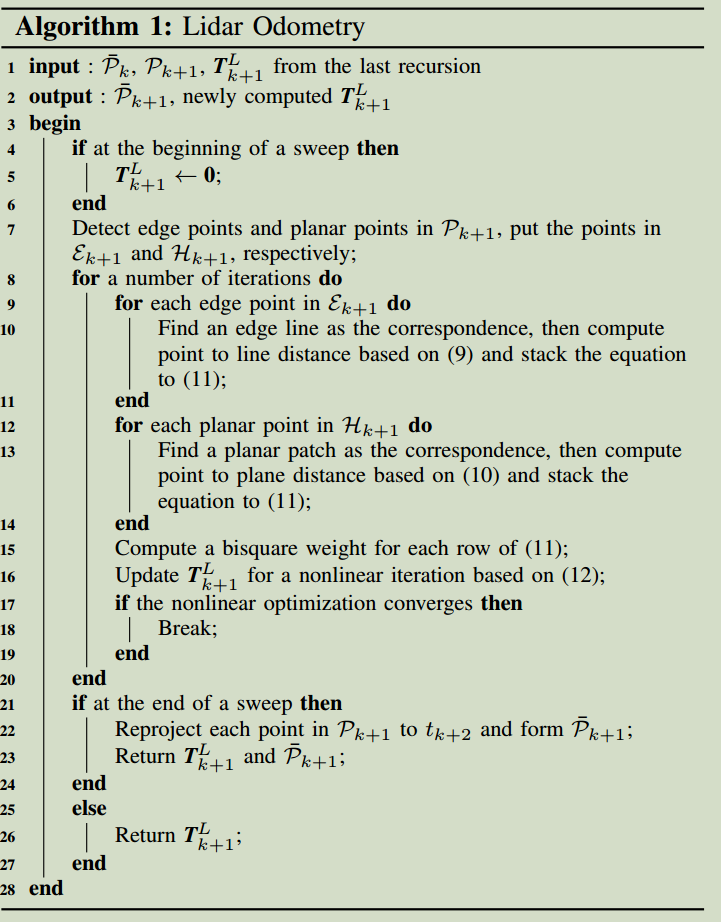
- 伪代码
算法二 LIDAR MAPPING
LOAM论文笔记
http://example.com/2025/08/18/25_08_18LOAM论文笔记/